係統地闡述了電(diàn)機驅動(dòng)往複泵輸送礦漿峰值分散(sàn)技術,在分析單台往複泵流量脈動(dòng)及壓力脈動產生原因的前提下,論述(shù)了多(duō)台(tái)泵向同一管路輸送礦漿時產生峰(fēng)值疊加(jiā)的原因及消除峰值疊加的兩(liǎng)個條件,識別最佳分散相角值。針對現有多電機泵協調輸(shū)送係統,采用電機軸相關(guān)的同步控製策略,提出了基於耦合補(bǔ)償的同步控(kòng)製策略實現輸送礦漿峰值分散。
在許多工藝裝置中,都存(cún)在利用多台往複式(shì)泵(含各類活塞、柱塞、隔膜型式的泵)向同一條管道輸送(sòng)礦漿的工況,其驅動裝置為多台電(diàn)機。在這類(lèi)工況中,時常出現振動(dòng),尤其是(shì)輸送壓力較高時,振動尤為劇烈。根據分散(sàn)相角值識別(bié),設計分區移動副,采用多電機的同步驅動,其同步性能會因各傳動軸的驅動特性不匹(pǐ)配、負載的擾動等因素的影響而惡化。因此,多(duō)電機同步(bù)控製成為(wéi)往複泵輸送料漿的關鍵部分之一。近年來(lái),國內外學者對多電機驅動的機械係統的同步控製進行(háng)了(le)廣泛的研究工作,真空技術網(http://www.chvacuum.com/)以前發布的文章也(yě)說明了同步控製的(de)一些方法。本文在此基礎上,根據(jù)往複泵的實際工況和功能需求,提出了(le)同步控製策略。
1、往複泵工作原(yuán)理
往複(fù)泵有往(wǎng)複式活塞(sāi)泵(bèng)、往複式(shì)柱塞泵、往複式活塞隔膜泵等(děng)多種結(jié)構型式。其工作原理如圖1 所示。利用曲柄連杆機構將旋轉運動轉變成直線(xiàn)運動,推動活塞往複運(yùn)動,造成腔內容(róng)積變化,完成礦漿輸送。
往複泵活塞往複位移X 的公式為:

式中,ϕ 為曲柄轉角(jiǎo),ϕ = ωt ,其中ω 為(wéi)曲柄角速度,t 為時間λ = RL,R 為曲柄半徑,L 為(wéi)連杆長度(dù)。根據上式,可以(yǐ)推導出單缸單作用往複(fù)泵的瞬時理論流量的公式為:

式中,qs 為瞬時理論流量,A 為活(huó)塞麵積。由於(yú)λ = RL的值一般很小,可以(yǐ)忽略不計,則式(2)變為(wéi):
顯然,單缸單(dān)作用往複泵的瞬時理論流量是脈動(dòng)的。工業(yè)生產(chǎn)中,普遍應用的往(wǎng)複泵的結(jié)構型式有兩種:臥式雙缸雙作用及臥式三缸單作用(以下(xià)簡稱(chēng)雙缸雙作用、三缸(gāng)單作(zuò)用)。雙缸(gāng)雙作用、三缸單作用泵的瞬時流量曲線可由單缸單作用的瞬時流量曲線(xiàn)疊加得(dé)到(dào)。
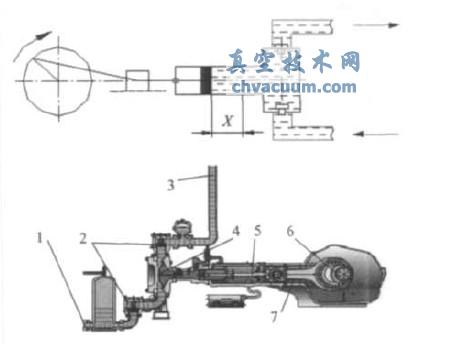
圖1 帶隔膜的往複(fù)泵(bèng)工作原理示意(yì)圖
對於雙缸雙作用,兩缸的活塞的相角差ϕ = 90° ,其瞬時流量qs 曲(qǔ)線見(jiàn)圖2,其中取有活塞杆端的麵積Ar 為無活塞杆端作用麵積A 的0.8~0.9 倍,即Ar = (0.8~0.9)A。

圖2 雙缸雙作用瞬時流量曲線圖(tú)
對於三缸單作用,三缸的各活塞之間的相角差ϕ = 120° ,其瞬時流量曲線見圖3。
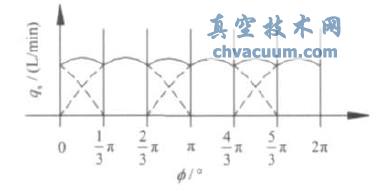
圖3 三缸單作用瞬時流量曲線圖
同(tóng)一速度參考指令下4 台電機的跟蹤誤差和同步誤差階躍響應曲線如(rú)圖6、圖7 所示。從圖中(zhōng)看出(chū),係統的跟(gēn)蹤誤差在0.8 s 的時間內(nèi)就很(hěn)快地收斂,同步誤差在1 s 的時間內收斂能夠達到高速同步控製係統的性能指標要求。
負載突變(3 s)時係統的(de)跟蹤誤差和同步(bù)誤差響應曲線,如圖6(a)和圖7(a)所示。從圖(tú)中可以看到,控製器對外部(bù)擾動具(jù)有較快的(de)跟蹤收斂速度,且能夠在擾動的情況下(xià)保持,同步誤(wù)差穩定很快趨近零,較好地達(dá)到高速同步控製係統的性能指(zhǐ)標要求。
結語
在(zài)往(wǎng)複泵(bèng)峰值分散技術的基礎上,采用耦合(hé)技術同步(bù)控製,泵(bèng)組運行平穩,工作可靠,有效的控製工作壓力脈動,至(zhì)此不僅提高了往複泵設計、製造水平,而且針對(duì)管道傳輸的同步控製方法研究,有助於管(guǎn)道化輸送技術(shù)進一步(bù)的(de)成熟與發展


